|
Jiawei Wang I am currently a Lecturer in the Department of Civil and Environmental Engineering at the University of Michigan, Ann Arbor, and a Postdoctoral Research Fellow in the Mobility Transformation Lab, working with Prof. Henry X. Liu. I received my Ph.D. degree in Mechanical Engineering at Tsinghua University in 2023, advised by Prof. Keqiang Li, and my Bachelor's Degree in Automotive Engineering at Tsinghua University in 2018. From Dec 2022 to Dec 2023, I was a visiting PhD student in the Automatic Control Laboratory at EPFL (École Polytechnique Fédérale de Lausanne), advised by Prof. Colin Jones. During my doctoral research, I also received guidance from Prof. Yang Zheng at UC San Diego. |
|
|
|
|
| 12/2025 | Our tutorial on Generative Simulation for E2E Autonomous Driving is accepted at IEEE IV 2026. Stay tuned! |
| 12/2025 | We have been selected as semi-finalists in the USDOT ARPA-I Ideas and Innovation Challenge! |
| 11/2025 | Our paper has been accepted by TR Part C. |
| 11/2025 | Our paper has been accepted by IEEE TITS. |
| 11/2025 | Our paper published in TR Part C has been recognized as ESI Highly Cited Paper! |
| 09/2025 | Check our new preprint on TeraSim-World. Codes and videos are available here. |
| 08/2025 | Excited to begin my new role as a Lecturer in the CEE Department at University of Michigan! |
| 07/2025 | Our paper about risk-adjustable driving environment by conditional diffusion was accepted by ITSC 2025. |
| 05/2025 | Check our new preprint on generative behavior simulation for Autonomous Vehicles: TeraSim. |
| 12/2024 | I was awarded Beijing 2024 Outstanding Doctoral Dissertation Award! |
| 11/2024 | Our paper was accepted by IEEE T-ITS. Congratulations to my great collaborator Xu Shang! |
| 11/2024 | Our paper was accepted by TR Part C. Congratulations to my great collaborator Shuai Li! |
| 08/2024 | Check this demo for Green Wave Speed Advisory system in Mcity as part of the Smart Intersection Project. |
| 06/2024 | We're excited to invite you to participate in the Mcity AV Challenge! |
| 02/2024 | Check our new preprints on robust data-driven predictive control: Paper 1 and Paper 2. |
| 01/2024 | Our paper was accepted to ACC 2024. |
| 10/2023 | I was awarded the Distinguished Doctoral Dissertation Award from China SAE. |
| 09/2023 | Excited to start my new position as Postdoctoral Research Fellow in the Michigan Traffic Lab! |
|
|
|

|
University of Michigan, Ann Arbor, U.S.
Aug 2025 - Present Lecturer, Department of Civil and Environmental Engineering Sep 2023 - Present Postdoctoral Research Fellow, Department of Civil and Environmental Engineering |
|
|
|

|
EPFL, Lausanne, Switzerland
Dec 2021 - Dec 2022 Visiting PhD, Automatic Control Laboratory |
|
Tsinghua University, Beijing, China
Aug 2018 - July 2023 Ph.D. in Mechanical Engineering Aug 2014 - July 2018 B.E. in Automotive Engineering, with a Minor in Computer Application |
|
My research interests lie at the intersection of learning, optimization, control, and simulation for urban mobility systems, with a particular emphasis on Connected and Automated Vehicles (CAVs). Precisely, I aim to advance CAVs' safety through high-fidelity simulation and advanced testing driven by Generative AI, while also pursuing reliable and scalable data-driven control strategies for sustainable transportation and broader societal benefits. |
|
|
| Generative Simulation for Autonomous Driving |
| Data-Driven Control and Digital-Twin Validation |
|
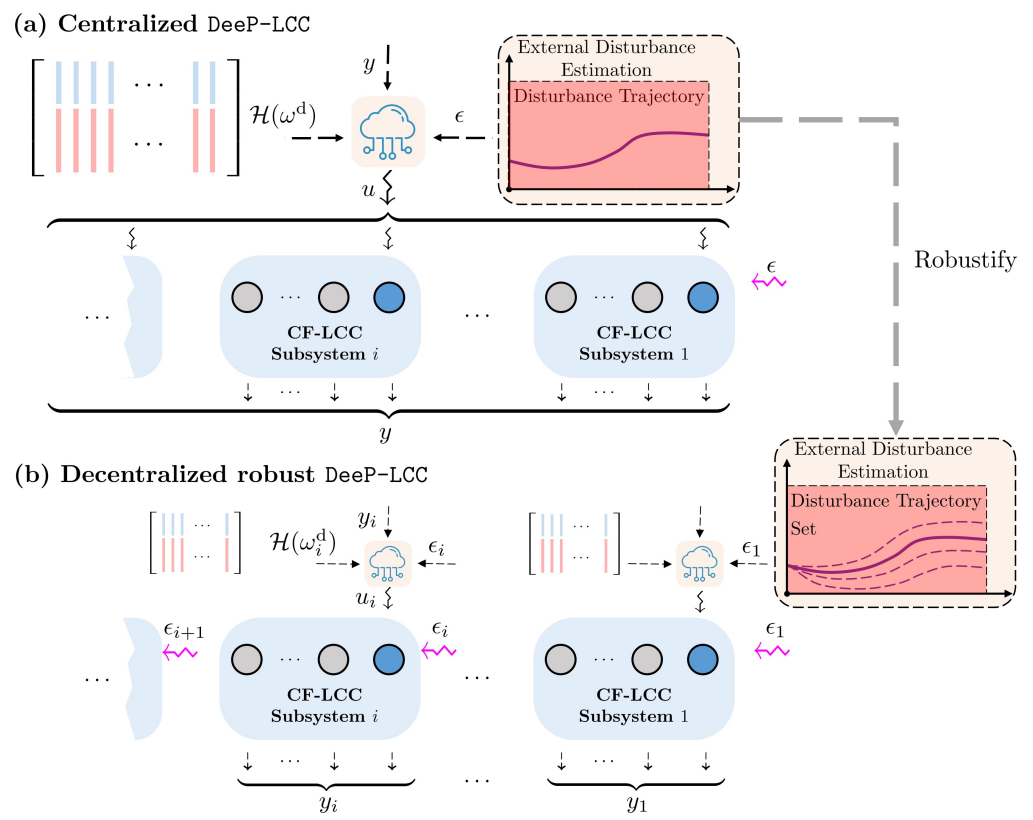
Decentralized Robust Data-Driven Predictive Control for Smoothing Mixed Traffic Flow
Xu Shang, Jiawei Wang, Yang Zheng IEEE Transactions on Intelligent Transportation Systems, 2025 arXiv A decentralized robust data-driven predictive control framework for CAVs to smooth mixed traffic flow while ensuring computational scalability. |
|
Robust Data-Driven Predictive Control for Mixed Platoons under Noise and Attacks
Shuai Li, Chaoyi Chen, Haotian Zheng, Jiawei Wang*, Qing Xu, Jianqiang Wang, Keqiang Li* Preprint, 2024 arXiv / related publication 1 / related publication 2 Robust data-driven predictive control framework for mixed platoons using reachability analysis to handle noise and attacks while ensuring safety. |
|
|
Implementation and Experimental Validation of Data-Driven Predictive Control for Dissipating Stop-and-Go Waves in Mixed Traffic
Jiawei Wang, Yang Zheng, Jianghong Dong, Chaoyi Chen, Mengchi Cai, Keqiang Li, Qing Xu IEEE Internet of Things Journal, 2024 arXiv / video First experimental validation of data-driven predictive control for CAVs in dissipating traffic waves using miniature experiment platform. |
|
|
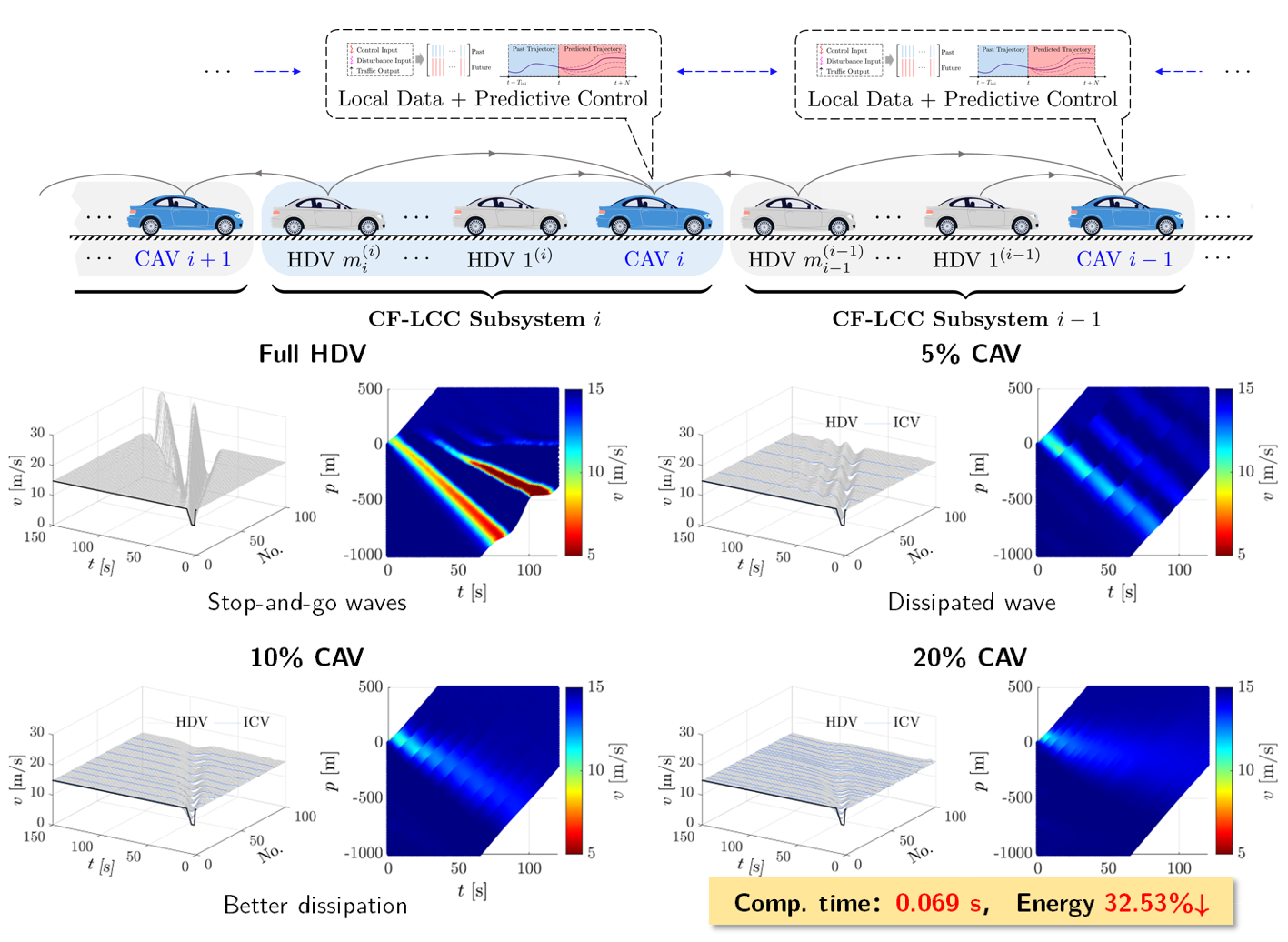
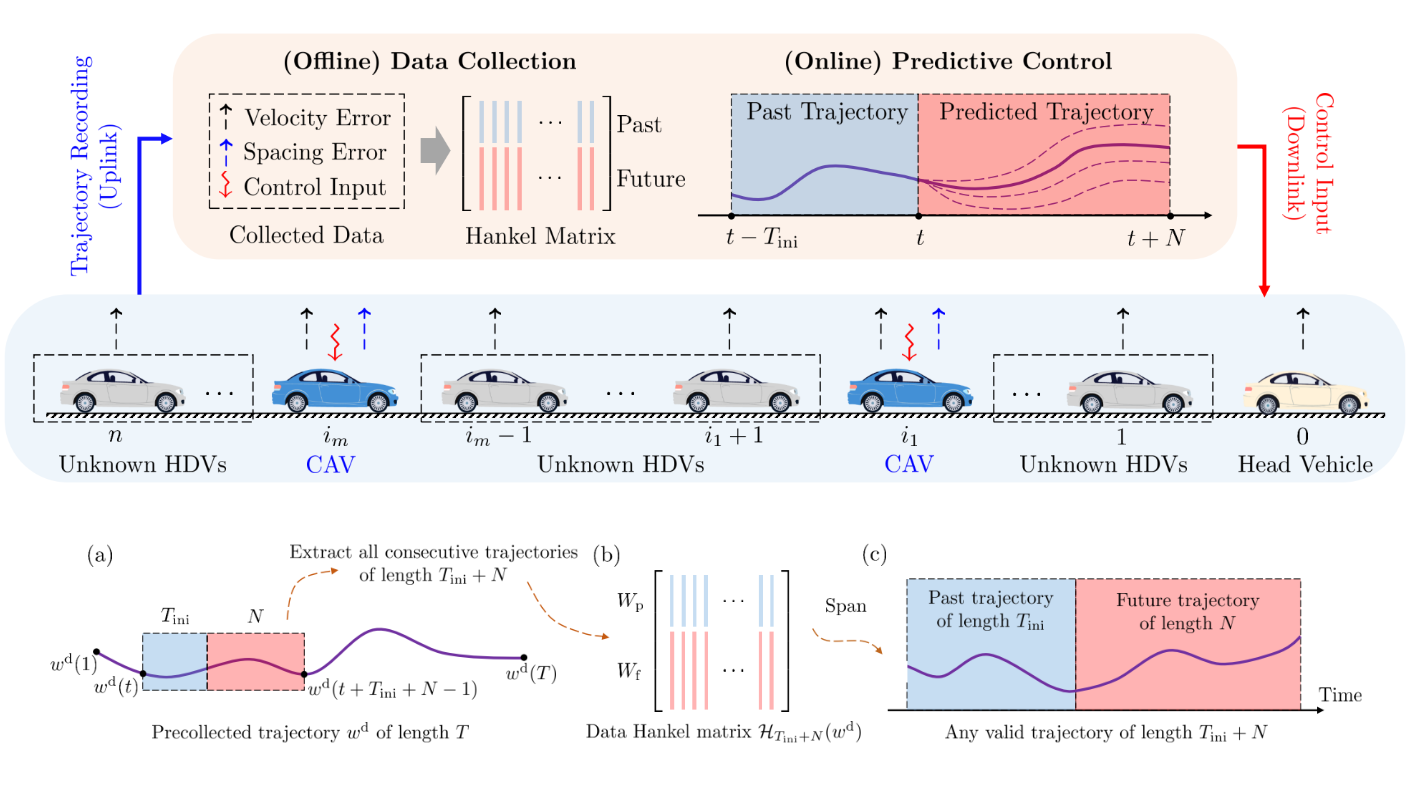
Distributed Data-Driven Predictive Control for Cooperatively Smoothing Mixed Traffic Flow
Jiawei Wang, Yingzhao Lian, Yuning Jiang, Qing Xu, Keqiang Li, Colin N. Jones Transportation Research Part C: Emerging Technologies, 2023 arXiv / code A cooperative distributed data-driven predictive control framework for CAVs in large-scale mixed traffic flow. |
|
DeeP-LCC: Data-Enabled Predictive Leading Cruise Control in Mixed Traffic Flow
Jiawei Wang, Yang Zheng, Keqiang Li, Qing Xu IEEE Transactions on Control Systems Technology, 2023 project page / arXiv / code / video A data-driven nonparametric strategy for safe and optimal control of CAVs in mixed traffic using Willems' fundamental lemma and receding horizon optimization. |
|
Mixed Cloud Control Testbed: Validating Vehicle-Road-Cloud Integration via Mixed Digital Twin
Jianghong Dong, Qing Xu, Jiawei Wang*, Chunying Yang, Mengchi Cai, Chaoyi Chen, Yu Liu, Jianqiang Wang, Keqiang Li IEEE Transactions on Intelligent Vehicles, 2023 project page / arXiv A miniature experimental platform MCCT based on Mixed Digital Twin concept for validating multi-vehicle cooperation and vehicle-road-cloud integration. |
| Principled Understanding of Mixed Traffic |
|
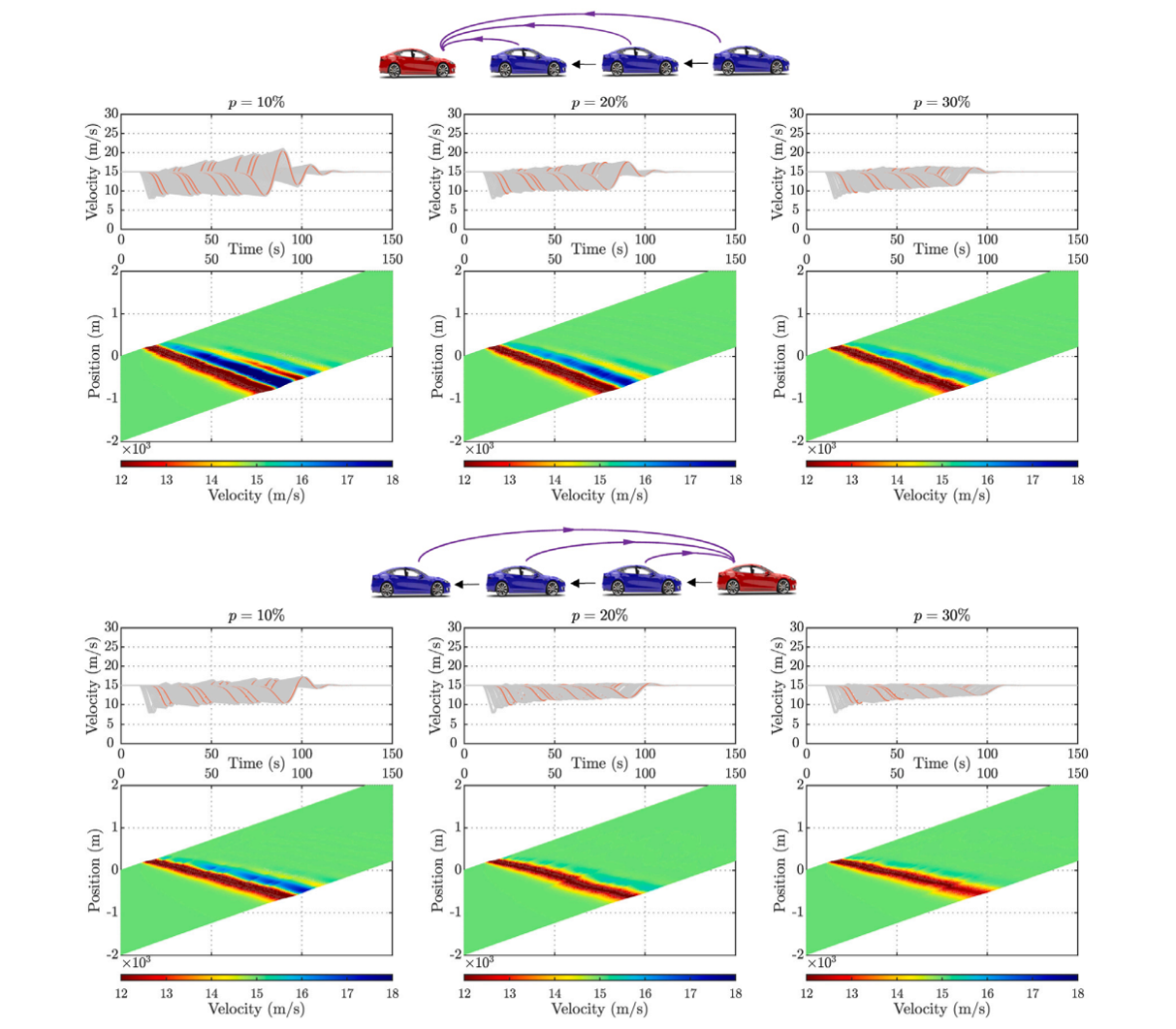
Influence of Information Flow Topology and Maximum Platoon Size on Mixed Traffic Stability
Shuai Li, Haotian Zheng, Jiawei Wang*, Chaoyi Chen, Qing Xu, Jianqiang Wang, Keqiang Li Transportation Research Part C: Emerging Technologies, 2025 paper Investigation on how the information flow topology ("looking ahead" or "looking behind") and the maximum platoon size influence the stability of mixed traffic flow. |
|
Leading Cruise Control in Mixed Traffic Flow: System Modeling, Controllability, and String Stability
Jiawei Wang, Yang Zheng, Chaoyi Chen, Qing Xu, Keqiang Li IEEE Transactions on Intelligent Transportation Systems, 2022 project page / arXiv / code A novel Leading Cruise Control (LCC) framework for CAVs to actively lead the motion of the vehicles behind, while maintaining the car-following operations to the vehicles ahead. |
|
|
Cooperative Formation of Autonomous Vehicles in Mixed Traffic Flow: Beyond Platooning
Keqiang Li†, Jiawei Wang†, Yang Zheng IEEE Transactions on Intelligent Transportation Systems, 2022 project page / arXiv / code Investigation of CAV formation patterns in mixed traffic from set-function optimization perspective, revealing optimal formations beyond platooning for system-level traffic benefits. |
|
|
Controllability Analysis and Optimal Control of Mixed Traffic Flow with Human-Driven and Autonomous Vehicles
Jiawei Wang, Yang Zheng, Qing Xu, Jianqiang Wang, Keqiang Li IEEE Transactions on Intelligent Transportation Systems, 2021 project page / arXiv / code First rigorous proof of controllability and stabilizability properties of mixed traffic systems via CAVs with heterogeneous human-driven vehicles. |
|
|
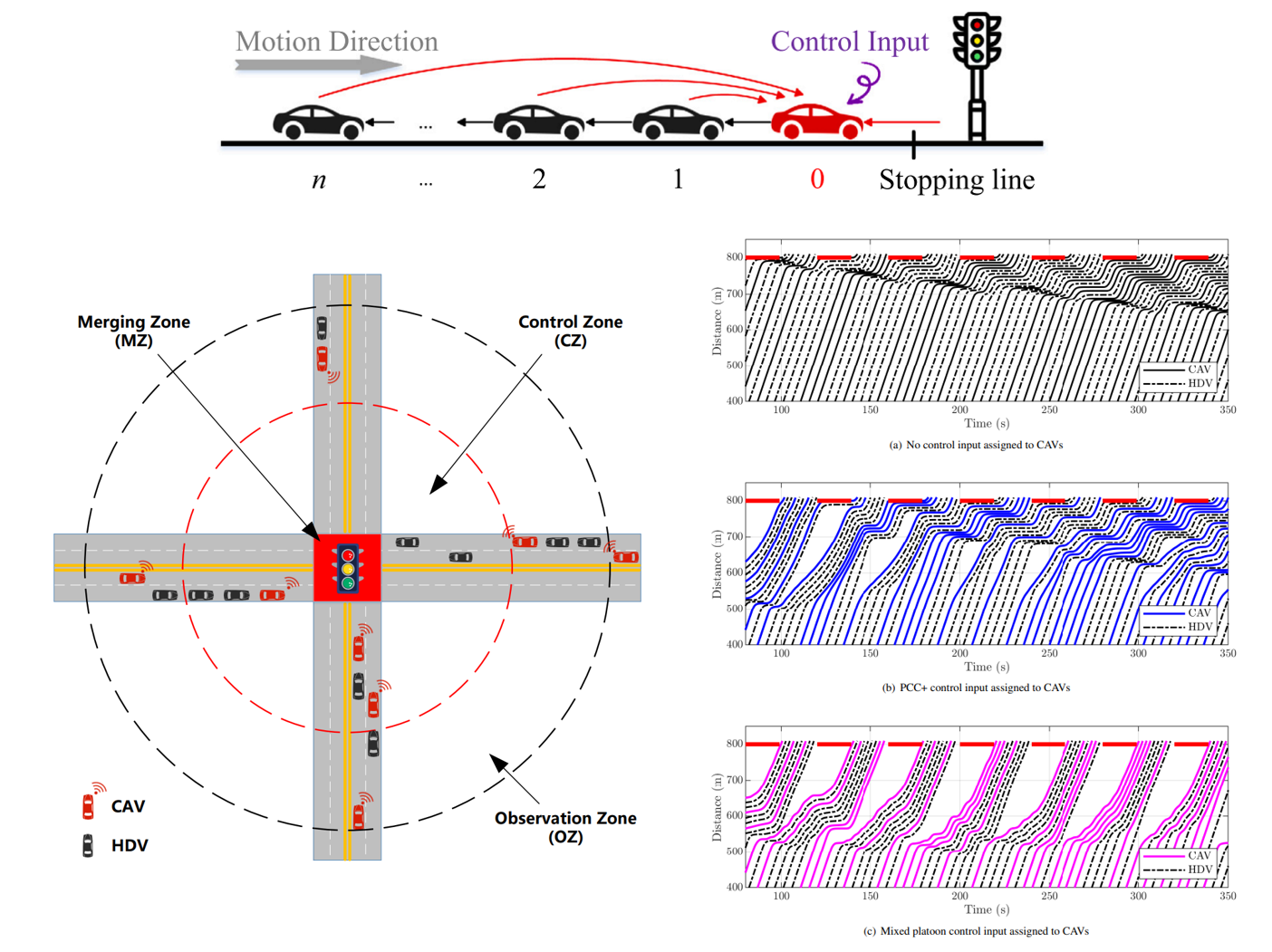
Chaoyi Chen, Jiawei Wang, Qing Xu, Jianqiang Wang, Keqiang Li Transportation Research Part C: Emerging Technologies, 2021 ESI Highly Cited Paper / arXiv Proposes "1+n" control framework for CAV control at signalized intersections in mixed traffic, enabling the CAVs to significantly improve the traffic energy efficiency at a low penetration rate. |
|
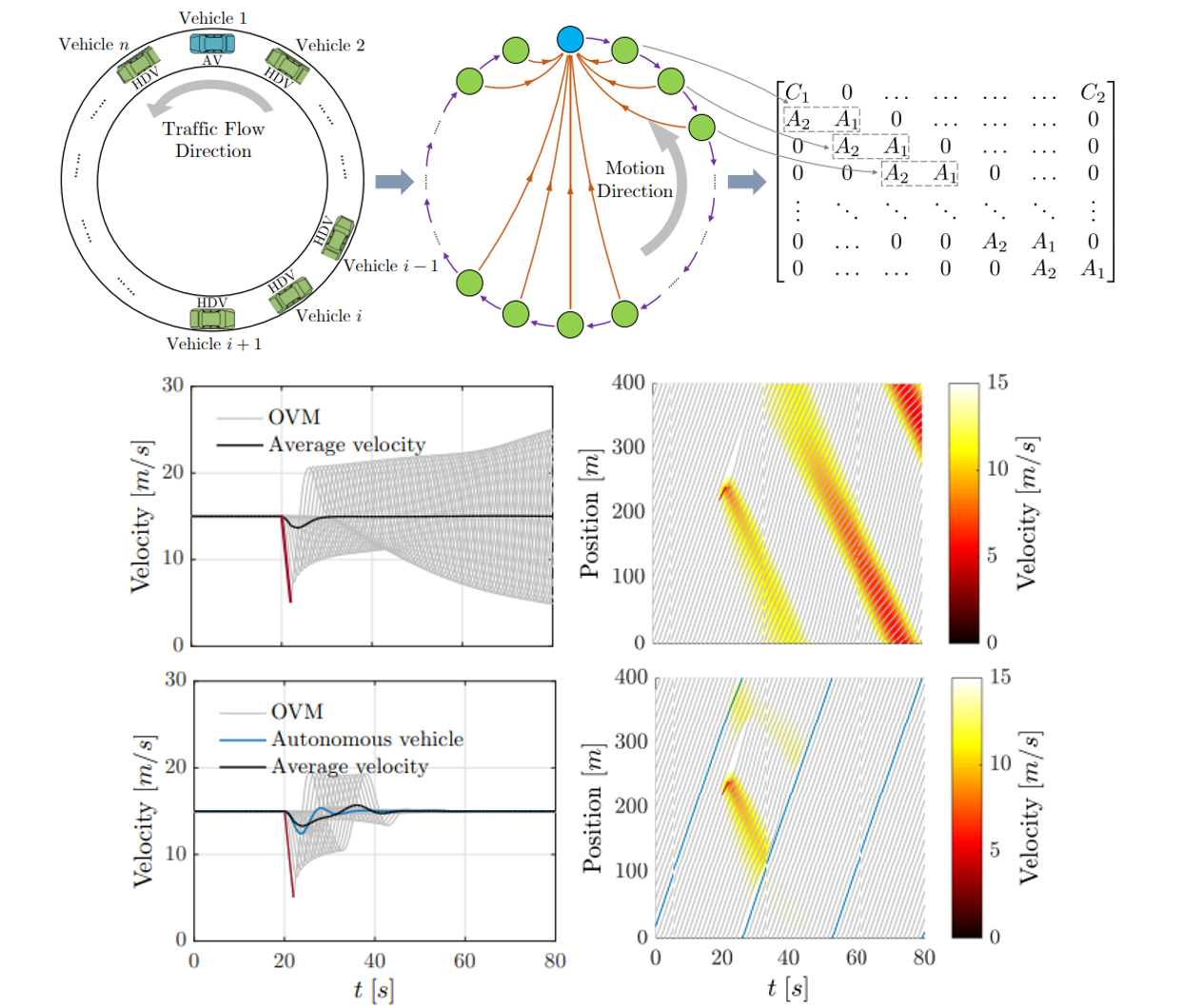
Smoothing Traffic Flow via Control of Autonomous Vehicles
Yang Zheng, Jiawei Wang, Keqiang Li IEEE Internet of Things Journal, 2020 project page / arXiv / code First rigorous theoretical analysis of controllability, stabilizability, and reachability of mixed traffic systems, showing that CAVs can effectively improve traffic with only 5% penetration rate. |
|
|
|
|
|
|
Based on the template from this site.
|