Distributed data-driven predictive control for cooperatively smoothing mixed traffic flow
 Distributed DeeP-LCC
Distributed DeeP-LCCAbstract
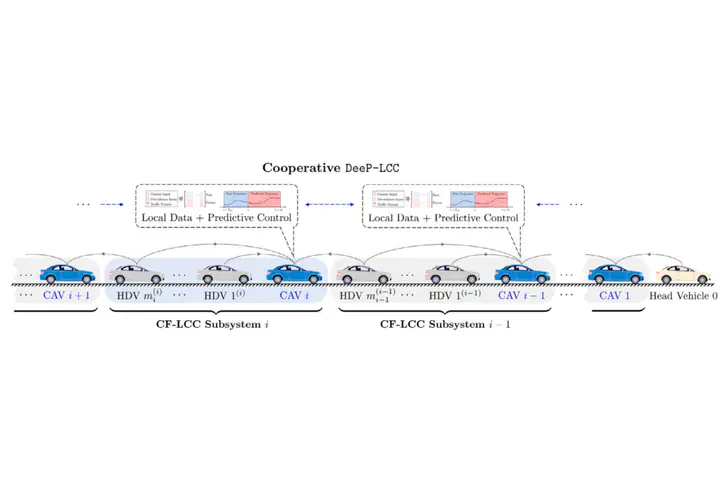
This paper proposes a cooperative DeeP-LCC (Data-EnablEd Predictive Leading Cruise Control) formulation and its distributed implementation algorithm. In cooperative DeeP-LCC, the traffic system is naturally partitioned into multiple subsystems with one single CAV, which collects local trajectory data for subsystem behavior predictions based on the Willems’ fundamental lemma. Meanwhile, the cross-subsystem interaction is formulated as a coupling constraint. Then, we employ the Alternating Direction Method of Multipliers (ADMM) to design the distributed DeeP-LCC algorithm. This algorithm achieves both computation and communication efficiency, as well as trajectory data privacy, through parallel calculation. Our simulations on different traffic scales verify the real-time wave-dampening potential of distributed DeeP-LCC, which can reduce fuel consumption by over 31.84% in a large-scale traffic system of 100 vehicles with only 5%–20% CAVs.