Leading cruise control in mixed traffic flow: System modeling, controllability, and string stability
 LCC
LCCAbstract
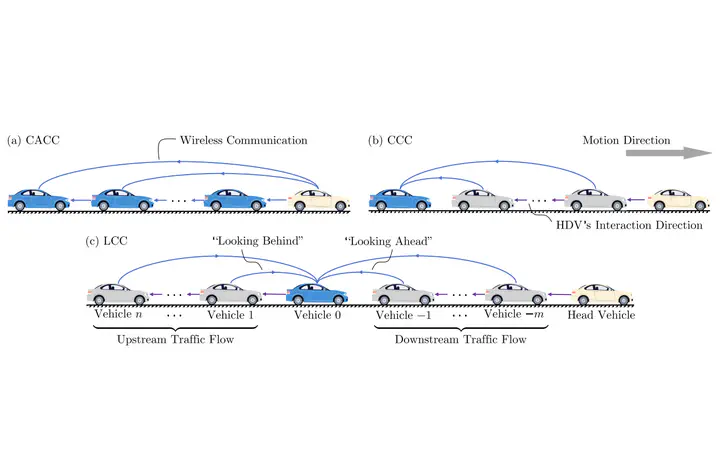
In this paper, we introduce a notion of Leading Cruise Control (LCC), in which the CAV maintains car-following operations adapting to the states of its preceding vehicles, and also aims to lead the motion of its following vehicles. Specifically, by controlling the CAV, LCC aims to attenuate downstream traffic perturbations and smooth upstream traffic flow actively. We first present the dynamical modeling of LCC, with a focus on three fundamental scenarios: car-following, free-driving, and Connected Cruise Control. Then, the analysis of controllability, observability, and head-to-tail string stability reveals the feasibility and potential of LCC in improving mixed traffic flow performance. Extensive numerical studies validate that the capability of CAVs in dissipating traffic perturbations is further strengthened when incorporating the information of the vehicles behind into the CAVs’ control.